College of Engineering News Room
Connecting the Future of Driverless Vehicles

USF Civil and Environmental Engineering professor Xiaopeng (Shaw) Li (fourth from right), Ph.D., details features of his lab’s autonomous and connected vehicle to U.S. Department of Transportation representatives and guests during a technology demonstration at USF.
by Russell Nay
While luxury carmakers like Tesla have provided a window into the future of what driverless vehicles could be like, the reality of the autonomous car driven by the masses is still unclear.
USF Civil and Environmental Engineering professor and Susan A. Bracken Faculty Fellow Xiaopeng (Shaw) Li, Ph.D., is conducting research alongside his team at the Connected and Autonomous Transportation Systems (CATS) Lab to determine what’s required of driverless cars to make them a widespread, realistic driving alternative.
“There are lots of configurations and lots of manufacturers that produce this technology, and you have different systems under the hood,” Li said. “We’re seeing a new dimension of controllability in this new tech.”
Li was awarded a 3-year National Science Foundation grant that starts January 1 and will help fund his lab’s connected and autonomous vehicle technology research. Up to this point, Li’s research at local test sites around Florida has mostly focused on automated vehicle technology using lidar — a remote sensing method using pulsing laser beams to create detailed 3D scans. This lets the CATS Lab’s lidar-equipped 2016 Lincoln MKZ navigate test courses and closed roads without the need of a driver at speeds of up to 55 mph.
“Busch Gardens, University Mall and USF Research Park test beds are where we test local low speed traffic, whereas the SunTrax testing facility allows us to focus on high-speed testing,” Li said.
The low-speed test areas in parking lots and on closed roads of participating research partners are set up like communities, with cones and barriers representing different streets complete with traffic signals, varying speed limits, different pavement types and mock crosswalks and intersections. SunTrax is a 475-acre Florida Department of Transportation research and development facility dedicated to testing emerging transportation technologies.
These test areas give Li and his team a variety of real-life driving situations to test their autonomous technology against, such as pedestrian or object avoidance, emergency braking, inclement weather, driving irregular roads and navigating airport pick-up and drop-off zones.

SunTrax features an oval track for more than two miles of high-speed testing, engineering experts on staff and specialized tools and services for researchers like Li and those at the CATS Lab to test emerging transportation technology.
After fine-tuning the autonomous capabilities of the CATS Lab vehicle, Li said that the next step of his team’s research is to start developing and testing the connected features of the car. Unlike an autonomous vehicle, a connected vehicle is connected to the surrounding transportation infrastructure and other cars on the road — digitally or physically.
If transportation sensors were integrated into the majority of roadways, and if most cars were connected vehicles, drivers would be able to receive real-time information from intersections, highways and other cars about traffic conditions, accidents and hazards.
“In the near future, we’re going to see more connected vehicles and more connected infrastructure,” Li said. “Vehicles will talk to vehicles and to infrastructure.”
In Li’s research, connected vehicles may even be capable of physically connecting and disconnecting from one another while in motion. While this testing has been limited to small robotic cars on a track, Li hopes to scale testing up to full-size passenger vehicles with a slow speed docking and undocking test at USF Research Park and other testbeds.
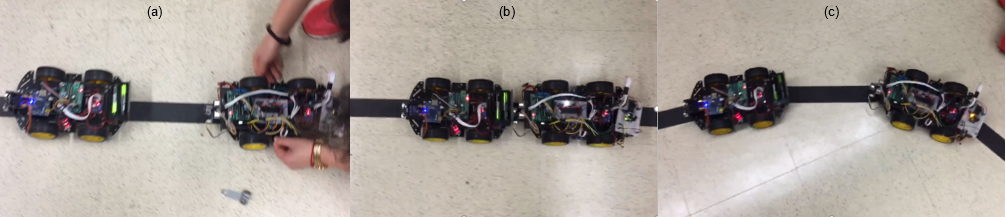
The CATS Lab has tested small-scale robotic cars with the ability to drive independently, connect with one another and then disconnect. These tests may one day be scaled up with passenger cars capable of the same actions.
This research will likely lead to collaborations with industry partners with a shared vision for physically connected, modular transportation systems. Robotics and AI startup NEXT Future Transportation, for example, has a consulting and research support relationship with Li’s team. In 2018, the company unveiled prototypes of its cube-shaped, self-driving transport vehicles during a demonstration in Dubai. The cubes connected to form a single shuttle, which passengers could walk throughout, before disconnecting again and parking at the end of a test course.
Modular, autonomous transportation systems are seen as a choice for the smart urban system of the far future, in which all of a city’s buildings and systems — such as power, waste removal and communications — are connected and automatically managed to maximize the efficiency of each resident’s usage.
“It basically means the system understands the needs of each resident in real time at any location and can provide the most appropriate solution autonomously,” Li said. “Transportation is a key component because it connects all these different pieces together and is linked to all infrastructure in an urban system.”
Li’s current research team consists of eight Ph.D. students, several visiting scholars and a number of undergrads. The autonomous vehicle testbed was built with a USF equipment grant, his Susan A. Bracken Faculty Fellowship and faculty startup funds from Li and Robert Bertini, director of the USF Center for Urban Transportation. Since its establishment, Li’s CATS Lab has leveraged the testbed to attract several research grants from NSF, the Federal Highway Administration, Leidos Inc., WSP inc., Connected Wise Inc. and the I-4 High-Tech Corridor Research Program. Li will collaborate with a number of other faculty members from CUTR and the Department of Civil and Environmental Engineering via these grants.
He plans to use upcoming NSF grant funding to recruit a postdoctoral researcher, as well as students of all degree levels who will work on lab projects under USF Civil and Environmental Engineering and CUTR faculty.
“We got quite a lot of support from our colleagues like Dr. Bertini (of CUTR),” Li said. “I don’t think a lot of our collaborations would have happened without Dr. Bertini’s efforts.”
“I also want to thank Dr. Pei-Sung Lin and Dr. Achilleas Kourtellis for their generous hosting of our vehicles in their labs and our collaborations with the DOT and local industry,” he said.

Li (left) gives a technical overview of his lab’s test vehicle to Bertini (middle) and to U.S. Department of Transportation Deputy Assistant Secretary Diana Furchtgott-Roth (right) during the USF tech demo.
Li hopes his team’s future research will lead to additional collaborations with engineering students and faculty from a variety of disciplines.
“I think this track of research will lead to many other opportunities that requires expertise from not only civil engineering and transportation engineering but from computer science, electrical and mechanical engineering,” he said. “I really enjoy the multi-discipline perspectives of our engineering college, and I hope this project can lead to bigger scale collaborations across more disciplines.”